Hello! I am Aswath
Muthuselvam, welcome to my personal website. In this space, I will share my projects and professional updates.
Currently, I am a software engineer at Magic Leap, working on Ground
Truth data using advanced Camera Systems, Motion capture systems for applications like Hand Tracking,
Localization, and Mapping. Previously, I graduated from the University of Maryland, College Park, with Master of
Engineering degree in Robotics. I also worked with Prof. Dinesh Manocha at the GAMMA
lab. I graduated with a Bachelors degree in Electronics and Communications Engineering from Vellore
Institute of Technology. During the final semester, I have interned at Ericsson India Global Services, where I
worked on “Deeplearning based disease detection in Horticultural crops.”
LinkedIn /
CV /
GitHub /
Twitter /
Google Scholar
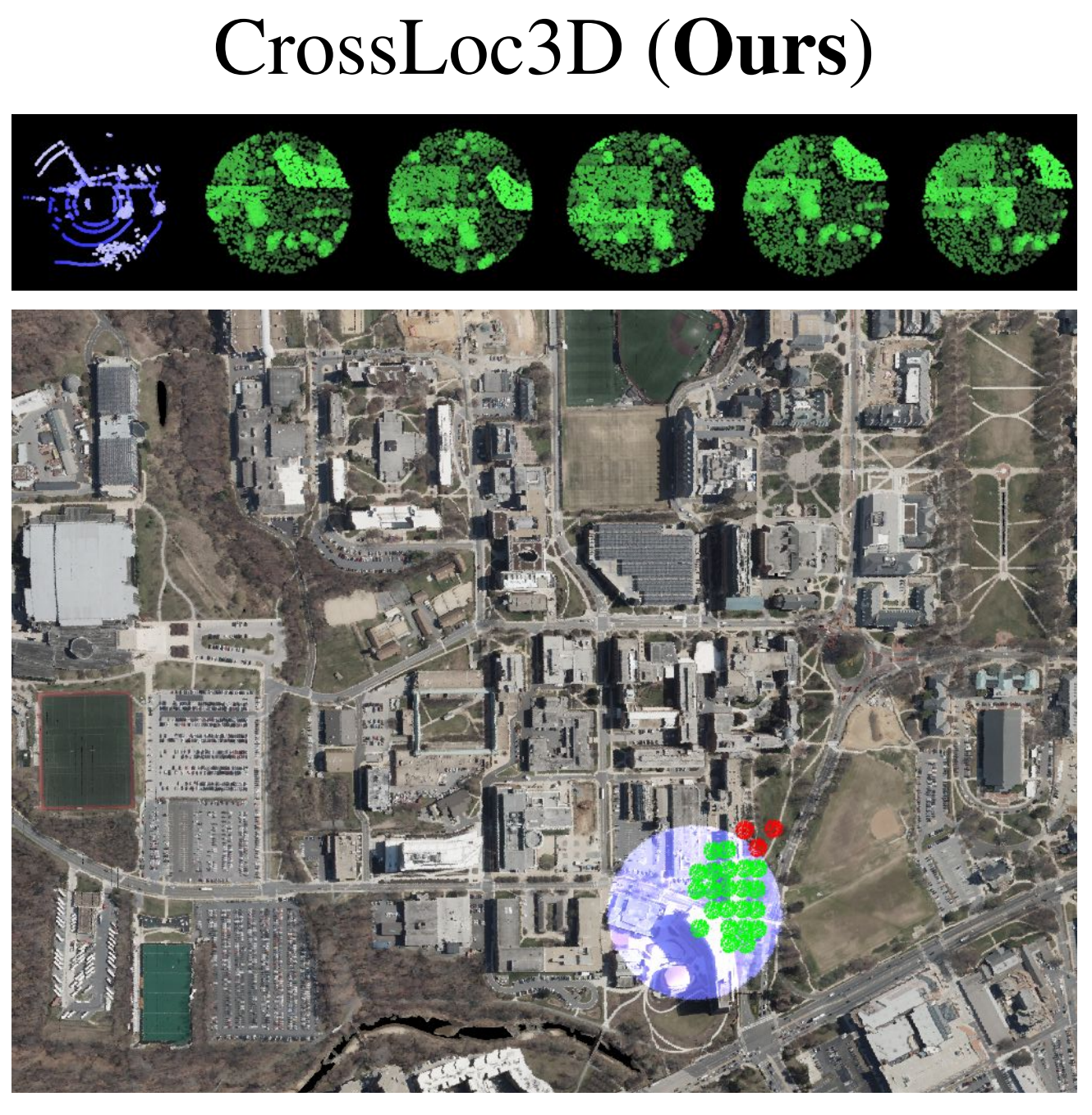
First,
we present a cross-source point cloud dataset, which consists of Ground Truth global point cloud in UTM
coordinates generated from aerial map and Query point clouds captured from Spot and Husky robots. Secondly, we
show a novel architecture to localize the Query point cloud in the Ground Truth point cloud.
Self Driving Car Trajectory prediction Github / Report
Predict
the trajectory of a Self-Driving vehicle, given a Birds eye view of the traffic scene. Used Lyft’s perdiction
dataset and L5Kit’s Jupyter notebooks template. Leveraging Attention mechanism of Vision Transformer and an
Fully connected layer to predict the trajectory of a Self Driving Vehicle.
1. Undistort 2
images with given camera extrinsics. 2. Do image path matching by keeping one image as
reference. 3. Create disparity map using sliding window method 4. Compute depth with disparity map.
A 6DOF arm can manipulate objects in SE3(translation + rotation) space, however, one constraint remains,
the arm’s reachability. OmniDirectional wheeled mobile robots are free to move in the XY plane in any
direction, allowing more freedom of movement than Non-Holonomic Car like robots. Combine these two ideas, we
get a high DOF arm + infinite reachability in XY plane. To name a couple of examples, these robots can be
used in warehouse operations and perform agricultural tasks. Technical approach: - Arm:
Calculation of inverse kinematic for the arm using Pseudo-Inverse Jacobian. - Robot base: Calculation of
angular velocity of motors by inverting Forward Transformation from base frame to wheel frame. Then using
PID for feedback control using errors in position.
Inverse kinematics for a 6-DOF Robotic arm is calcuated by taking Jacobian Pseudo-Inverse of the Forward
Transformation of each arm joints. Implemented with Coppelia-Sim simulation software.
Multiple agents push a large object. Each agent plans a path to the destination using RRT* algorithm.
Ground Plane Free
Space Segmentation for Autonomous robots Github /
Using an RGB image of dimension 128x128 to predict the free space on the ground for a wheeled mobile
robot to navigate its environment.
Neural Network: Train and Run a small Unet on custom dataset yields Inference time of 7
milliseconds.
Classical
vision:
1. Sample points near the robot and Segment the image. 2. Perform Optical flow to track
the points in sucessive frames. Compute Homography. 3. Filter out points that are not falling under
the Homography Transform of the points closer to the robot. 4. Remove Segments which has less
density of points. 5. Result: Inference time of 2 milliseconds. Video on the left.

 RRT
CUDA
RRT
CUDA Monocular Visual Odometry
Monocular Visual Odometry Human Pose
Estimation and Forecasting
Human Pose
Estimation and Forecasting Dijsktra Path
Planning
Dijsktra Path
Planning A* Path
Planning
A* Path
Planning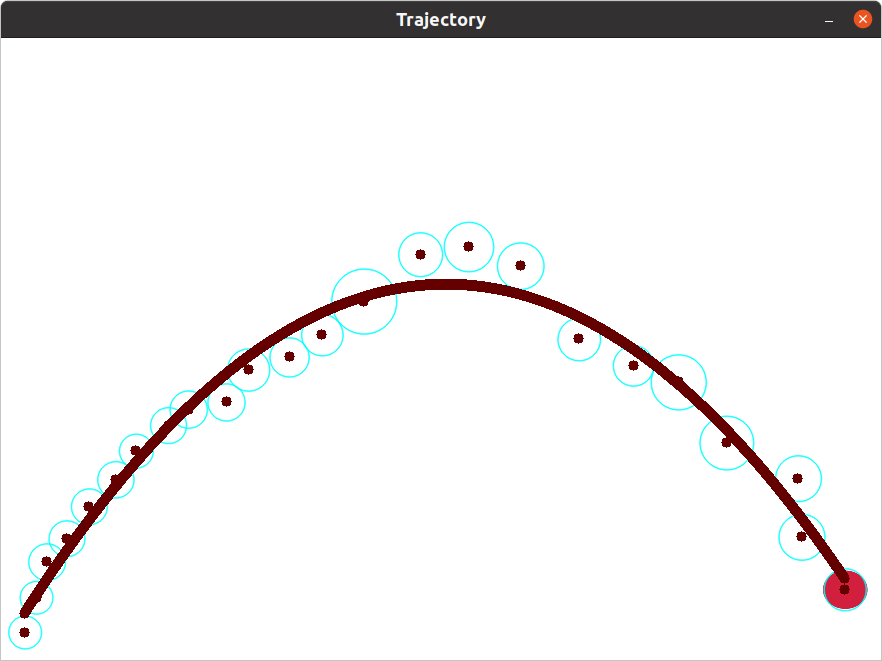 Curve
Fitting through data points
Curve
Fitting through data points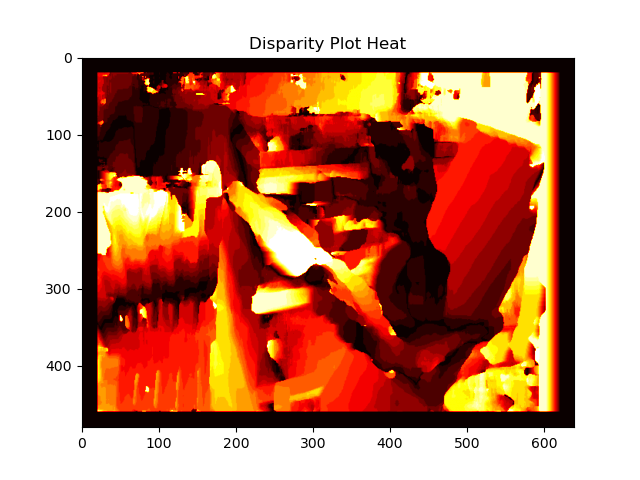 Depth from 2 images
Depth from 2 images KNN Image
Segmentation
KNN Image
Segmentation Realtime
Detection
Realtime
Detection